
 | ||
The global navigation satellite system (GNSS) positioning for receiver's position is derived through the calculation steps, or algorithm, given below. In essence, a GNSS receiver measures the transmitting time of GNSS signals emitted from four or more GNSS satellites and these measurements are used to obtain its position (i.e., spatial coordinates) and reception time.
Contents
Calculation steps
- A global-navigation-satellite-system (GNSS) receiver measures the apparent transmitting time,
t ~ i i = 1 , 2 , 3 , 4 , . . , n ), simultaneously. - GNSS satellites broadcast the messages of satellites' ephemeris,
r i ( t ) , and intrinsic clock bias (i.e., clock advance),δ t clock,sv , i ( t ) as the functions of (atomic) standard time, e.g., GPST. - The transmitting time of GNSS satellite signals,
t i t ~ i = t i + δ t clock , i ( t i ) andδ t clock , i ( t i ) = δ t clock,sv , i ( t i ) + δ t orbit-relativ , i ( r i , r ˙ i ) , whereδ t orbit-relativ , i ( r i , r ˙ i ) is the relativistic clock bias, periodically risen from the satellite's orbital eccentricity and Earth's gravity field. The satellite's position and velocity are determined byt i r i = r i ( t i ) andr ˙ i = r ˙ i ( t i ) . - In the field of GNSS, "geometric range",
r ( r A , r B ) , is defined as straight range, or 3-dimensional distance, fromr A r B - The receiver's position,
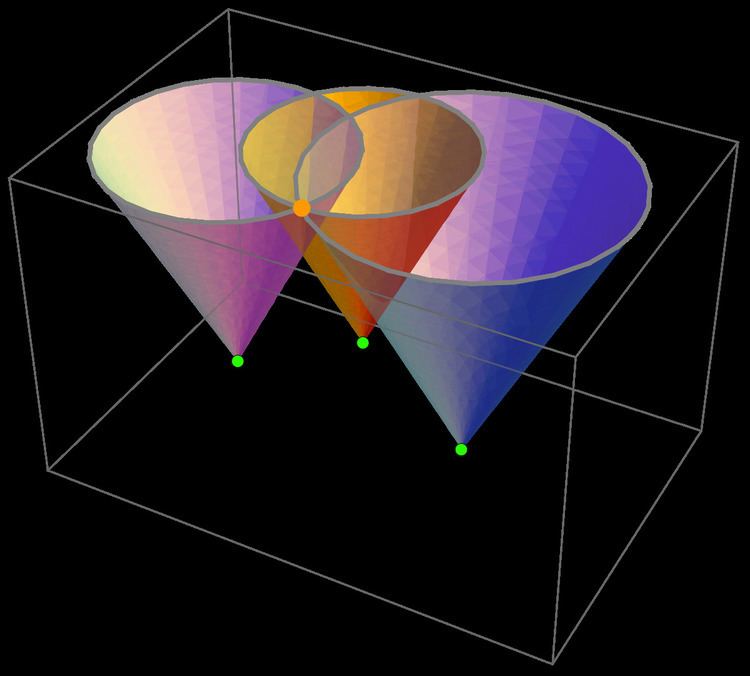
r rec t rec r ( r i , r rec ) / c + ( t i − t rec ) = 0 in inertial frame, wherec is the speed of light. The signal transit time is− ( t i − t rec ) . - The above is extended to the satellite-navigation positioning equation,
r ( r i , r rec ) / c + ( t i − t rec ) + δ t atmos , i − δ t meas-err , i = 0 , whereδ t atmos , i δ t meas-err , i - The Gauss–Newton method can be used to solve the nonlinear least-squares problem for the solution:
( r ^ rec , t ^ rec ) = arg min ϕ ( r rec , t rec ) , whereϕ ( r rec , t rec ) = ∑ i = 1 n ( δ t meas-err , i / σ δ t meas-err , i ) 2 δ t meas-err , i r rec t rec - The posterior distribution of
r rec t rec exp ( − 1 2 ϕ ( r rec , t rec ) ) , whose mode is( r ^ rec , t ^ rec ) . Their inference is formalized as maximum a posteriori estimation. - The posterior distribution of
r rec ∫ − ∞ ∞ exp ( − 1 2 ϕ ( r rec , t rec ) ) d t rec
The GPS case
in which