
 | ||
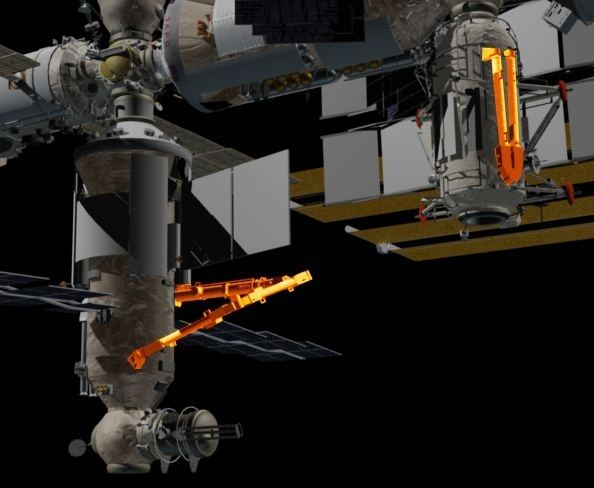
The European Robotic Arm (ERA) is a robotic arm to be attached to the Russian segment of the International Space Station. It will be the first robot arm able to work on the Russian space station segments, and will supplement the two Russian Strela cargo cranes that are already installed on the Pirs module. The ERA is designed and assembled by Airbus Defence and Space Netherlands (formerly Dutch Space).
Contents
Major features and tasks
The ERA has several interesting features. Most prominent are its ability to 'walk' around the exterior of the Russian segments of the station under its own control, moving hand-over-hand between pre-fixed basepoints, and its ability to perform many tasks automatically or semi-automatically, thereby freeing its operators to do other work. Specific tasks of ERA include:
The International Space Station already features three robotic arms, the first being the Canadarm2, but because the Russian grapple fixtures are different, that arm and Dextre can only be used on the Zarya module of the Russian segment. The third arm is fixed on the Japanese Experiment Module, the Remote Manipulator System (JEM-RMS) uses a similar grapple fixture to Canadarm2. Because all Russian and European spacecraft dock automatically there is no need to manipulate spacecraft on the Russian segment so the European arm is half the length and less powerful than Canadarm2.
Developed for the European Space Agency (ESA) by a number of European space companies, with Dutch Space as prime contractor and subcontractors in 8 countries, the robot arm will be launched by a Proton rocket, along with the MLM, in 2017 (previously planned: 2015) to be put to work in space by the ISS crew. In 2010, a spare elbow joint for the arm was launched preemptively, attached to the Mini-Research Module 1 (MRM-1). The MLM will also serve as home base for ERA; originally, the arm was going to be attached to the cancelled Science Power Platform which would have had eight solar arrays.
Control of ERA
Astronauts can control the robot from both inside and outside the space station. Control from inside the space station (Intra Vehicular Activity-Man Machine Interface (IVA-MMI)) uses a laptop, which shows a model of the ERA and its surroundings. Control from outside the space station (Extra Vehicular Activity-Man Machine Interface (EVA-MMI)) uses a specially-designed interface that can be used while in a spacesuit.