
 | ||
In mathematical optimization, the ellipsoid method is an iterative method for minimizing convex functions. When specialized to solving feasible linear optimization problems with rational data, the ellipsoid method is an algorithm which finds an optimal solution in a finite number of steps.
Contents
- History
- Description
- Unconstrained minimization
- Inequality constrained minimization
- Application to linear programming
- Performance
- References
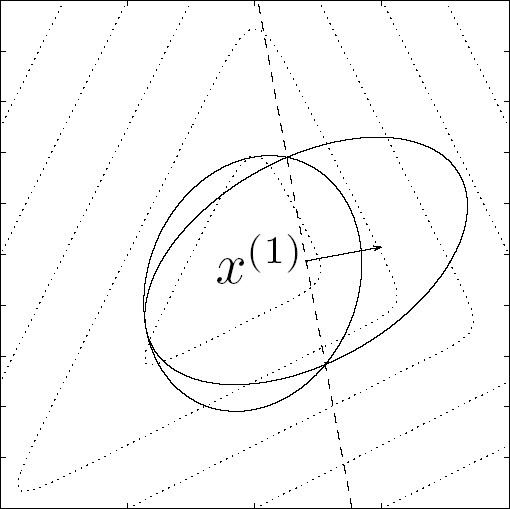
The ellipsoid method generates a sequence of ellipsoids whose volume uniformly decreases at every step, thus enclosing a minimizer of a convex function.
History
The ellipsoid method has a long history. As an iterative method, a preliminary version was introduced by Naum Z. Shor. In 1972, an approximation algorithm for real convex minimization was studied by Arkadi Nemirovski and David B. Yudin (Judin). As an algorithm for solving linear programming problems with rational data, the ellipsoid algorithm was studied by Leonid Khachiyan: Khachiyan's achievement was to prove the polynomial-time solvability of linear programs.
Following Khachiyan's work, the ellipsoid method was the only algorithm for solving linear programs whose runtime had been proved to be polynomial until Karmarkar's algorithm. However, Karmarkar's interior-point method and variants of the simplex algorithm are much faster than the ellipsoid method in practice. Karmarkar's algorithm is also faster in the worst case.
However, the ellipsoidal algorithm allows complexity theorists to achieve (worst-case) bounds that depend on the dimension of the problem and on the size of the data, but not on the number of rows, so it remained important in combinatorial optimization theory for many years. Only in the 21st century have interior-point algorithms with similar complexity properties appeared.
Description
A convex minimization problem consists of a convex function
containing a minimizer
Unconstrained minimization
At the k-th iteration of the algorithm, we have a point
We query the cutting-plane oracle to obtain a vector
We therefore conclude that
We set
where
The stopping criterion is given by the property that
Inequality-constrained minimization
At the k-th iteration of the algorithm for constrained minimization, we have a point
for all feasible z.
Application to linear programming
Inequality-constrained minimization of a function that is zero everywhere corresponds to the problem of simply identifying any feasible point. It turns out that any linear programming problem can be reduced to a linear feasibility problem (e.g. minimize the zero function subject to some linear inequality and equality constraints). One way to do this is by combining the primal and dual linear programs together into one program, and adding the additional (linear) constraint that the value of the primal solution is no worse than the value of the dual solution. Another way is to treat the objective of the linear program as an additional constraint, and use binary search to find the optimum value.
Performance
The ellipsoid method is used on low-dimensional problems, such as planar location problems, where it is numerically stable. On even "small"-sized problems, it suffers from numerical instability and poor performance in practice.
However, the ellipsoid method is an important theoretical technique in combinatorial optimization. In computational complexity theory, the ellipsoid algorithm is attractive because its complexity depends on the number of columns and the digital size of the coefficients, but not on the number of rows. In the 21st century, interior-point algorithms with similar properties have appeared.