
Available in 9 languages Launched 2016 | Owner RWTH Aachen University Current status Active | |
 | ||
Type of site Route planning software Website enav.embedded.rwth-aachen.de | ||
The project eNav – A navigation system for electric wheelchairs uses several distinct methods and ideas concerning embedded systems to better measure as well as utilize the battery capacity of electric wheelchairs. Furthermore, barriers are detected, which can then be avoided. The hallmark of the navigation system is the calculation of an energy efficient route, which is conducted additionally to the calculation of the shortest route. The user has the option to choose between both. eNav can be accessed as a route planner using a web browser. In the near future, a free navigation app should be available in the Google Play Store.
Contents
eNav is a project at the RWTH Aachen, which has been launched by the informatics chair I11 to increase the life quality of people with an impairment.
Idea
The initial idea for eNav originated because of the lack of support from present Navigation systems for electric wheelchair users. A common navigation system can neither provide information about the incline of the to be traversed route, nor can it estimate whether the planned route can be overcome with the current battery level. Inspired by the project RollStuhlrouting an idea originated, to specify an according navigation-system. Because of the fact that battery level indicators of electric wheelchairs are inaccurate and unreliable, the motivation arises to develop a system with improved battery level detection. Additionally, emerging technologies should be used to calculate an energy efficient route by consideration of topographical characteristics. The user of the navigation system can choose between the shortest and an energy efficient route.
Map-data
For the calculation of the energy-efficient route, a 3D-map with road surface information is required for the eNav-system. Furthermore, information about accessibility is required to assure practicability of the calculated route for an electric wheelchair user. Additionally, the accessibility information of individual buildings (POI) is of interest. The map-data of eNav consists of four layers to warrant all these map-properties.
1. OpenStreetMap
The first layer is formed by OpenStreetMap as basis. From it, the complete road network is extracted. Moreover, information about accessibility can be directly extracted or derived from other information like, for example, stairs or ramps.
2. Laserscan
For the second layer, the district government of Cologne provided Laserscan-data. The accuracy of this data is ±20 cm. The data provides a possibility to create a three-dimensional map for the system. The incline of a road can be derived from the three-dimensional coordinates of the map. The incline has a significant influence on the energy consumption of an electric wheelchair.
3. Route surface
Route surface information forms the third layer. These are partly enriched by the information provided by the Städteregion Aachen. This information contains accurate details about the surface of a road, for example, the surface is asphalt or cobblestone. Moreover, by using crowd-sourcing or more specifically Volunteered geographic information (VGI) and Contributed Geographical Information (CGI), road surface information is permanently accumulated and incorporated. This is done by measuring the vertical acceleration of an accelerometer of a smartphone. Based on the measured values, the road surface type can be retrospectively deduced, whether it consisted out of cobblestone or asphalt. By using GPS, an road surface type can be assigned to a traveled route.
4. POI
In the last layer a connection with Wheelmap.org is made, to enable the user to obtain information about accessibility of buildings during navigation. That means, the POI are indicated to the user as Green (Accessible), Orange (Limited accessible), Red (Not accessible) or grey (unknown). A Point Of Interest can be directly selected as a route target.
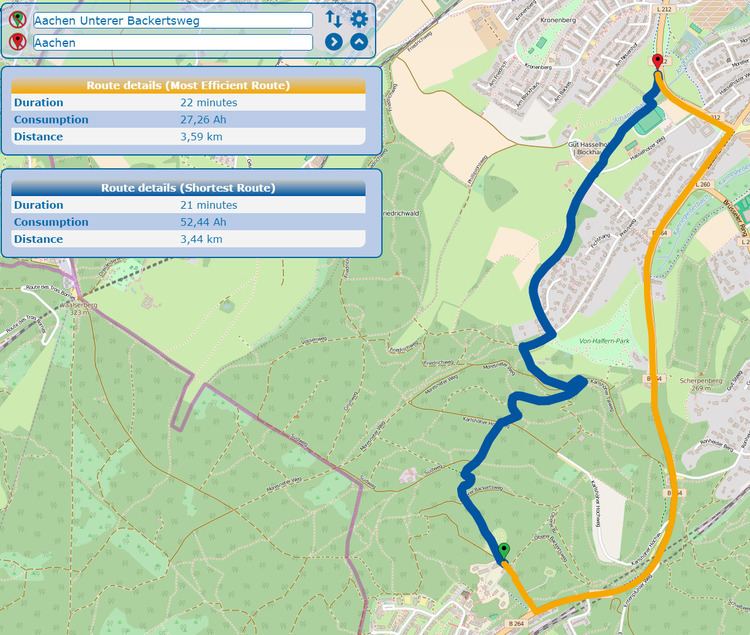
Energy-efficient Route
For routing a weighted graph is necessary. For calculating the shortest route, the length of the road is used as edge weight. During energy-efficient routing, the energy consumption of an electric wheelchair forms the edge weight. Currently, the energy consumption of an electric wheelchair is determined by following influencing factors:
From this the following consumption function can be derived:
Because of the exponential weighting function an special A*-heuristic has been developed, which accelerates route calculation.
Viability
An evaluation as part of the eNav-Project found, that in 41% of all tested cases a route exists, which is more energy-efficient than the shortest.