
 | ||
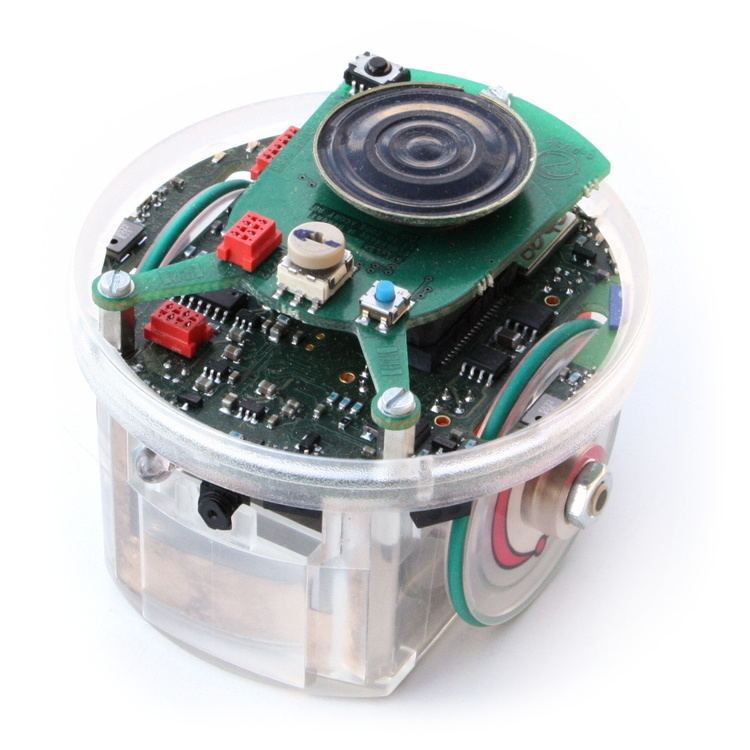
The e-puck is a small (7 cm) differential wheeled mobile robot. It was originally designed for micro-engineering education by Michael Bonani and Francesco Mondada at the ASL laboratory of Prof. Roland Siegwart at EPFL (Lausanne, Switzerland). The e-puck is open hardware and its onboard software is open source, and is built and sold by several companies.
Contents
Technical details
Extensions
New modules can be stacked on top of the e-puck; the following extensions are available:
Scientific use
Since the e-puck is open hardware, its price is lower than competitors. This is leading to a rapid adoption by the scientific community in research despite the original educational orientation of the robot. The e-puck has been used in collective robotics[1] [2] [3], evolutionary robotics [4], and art-oriented robotics [5] [6][7].