
 | ||
Lecture 2 differential geometry of curves
Differential geometry of curves is the branch of geometry that deals with smooth curves in the plane and in the Euclidean space by methods of differential and integral calculus.
Contents
- Lecture 2 differential geometry of curves
- Definitions
- Re parametrization and equivalence relation
- Length and natural parametrization
- Frenet frame
- Bertrand curve
- Special Frenet vectors and generalized curvatures
- Tangent vector
- Normal or curvature vector
- Curvature
- Binormal vector
- Torsion
- Main theorem of curve theory
- FrenetSerret formulas
- 2 dimensions
- 3 dimensions
- n dimensions general formula
- Additional reading
- References
Starting in antiquity, many concrete curves have been thoroughly investigated using the synthetic approach. Differential geometry takes another path: curves are represented in a parametrized form, and their geometric properties and various quantities associated with them, such as the curvature and the arc length, are expressed via derivatives and integrals using vector calculus. One of the most important tools used to analyze a curve is the Frenet frame, a moving frame that provides a coordinate system at each point of the curve that is "best adapted" to the curve near that point.
The theory of curves is much simpler and narrower in scope than the theory of surfaces and its higher-dimensional generalizations, because a regular curve in a Euclidean space has no intrinsic geometry. Any regular curve may be parametrized by the arc length (the natural parametrization) and from the point of view of a bug on the curve that does not know anything about the ambient space, all curves would appear the same. Different space curves are only distinguished by the way in which they bend and twist. Quantitatively, this is measured by the differential-geometric invariants called the curvature and the torsion of a curve. The fundamental theorem of curves asserts that the knowledge of these invariants completely determines the curve.
Definitions
Let (i)
of class
One may think of the parameter
If
If
If each component function of
We write
We say that
is a linearly independent subset of
In particular, a parametric
Re-parametrization and equivalence relation
Given the image of a parametric curve, one can define several different parametrizations of the parametric curve. Differential geometry aims to describe the properties of parametric curves that are invariant under certain re-parametrizations. We thus have to define a suitable equivalence relation on the set of all parametric curves. The differential-geometric properties of a parametric curve (e.g., its length, its Frenet frame and its generalized curvature) are invariant under re-parametrization and therefore properties of the equivalence class itself. The equivalence classes are called
Two parametric
and
Re-parametrization defines an equivalence relation on the set of all parametric
We can define an even finer equivalence relation of oriented parametric
Equivalent parametric
Length and natural parametrization
The length
The length of a parametric curve is invariant under re-parametrization and is therefore a differential-geometric property of the parametric curve.
For each regular parametric
Writing
This parametrization is preferred because the natural parameter
In practice, it is often very difficult to calculate the natural parametrization of a parametric curve, but it is useful for theoretical arguments.
For a given parametric curve
The quantity
is sometimes called the energy or action of the curve; this name is justified because the geodesic equations are the Euler–Lagrange equations of motion for this action.
Frenet frame
A Frenet frame is a moving reference frame of n orthonormal vectors ei(t) which are used to describe a curve locally at each point γ(t). It is the main tool in the differential geometric treatment of curves as it is far easier and more natural to describe local properties (e.g. curvature, torsion) in terms of a local reference system than using a global one like the Euclidean coordinates.
Given a Cn + 1-curve γ in Rn which is regular of order n the Frenet frame for the curve is the set of orthonormal vectors
called Frenet vectors. They are constructed from the derivatives of γ(t) using the Gram–Schmidt orthogonalization algorithm with
The real-valued functions χi(t) are called generalized curvatures and are defined as
The Frenet frame and the generalized curvatures are invariant under reparametrization and are therefore differential geometric properties of the curve.
Bertrand curve
A Bertrand curve is a Frenet curve in
Special Frenet vectors and generalized curvatures
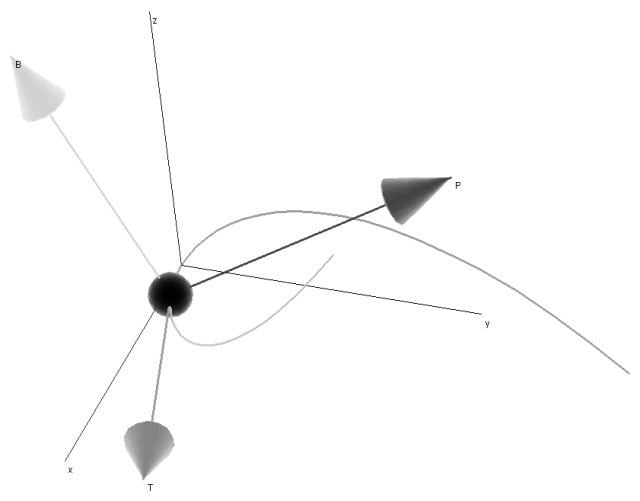
The first three Frenet vectors and generalized curvatures can be visualized in three-dimensional space. They have additional names and more semantic information attached to them.
Tangent vector
If a curve γ represents the path of a particle, then the instantaneous velocity of the particle at a given point P is expressed by a vector, called the tangent vector to the curve at P. Mathematically, given a parametrized C1 curve γ = γ(t), for every value t = t0 of the parameter, the vector
is the tangent vector at the point P = γ(t0). Generally speaking, the tangent vector may be zero. The magnitude of the tangent vector,
is the speed at the time t0.
The first Frenet vector e1(t) is the unit tangent vector in the same direction, defined at each regular point of γ:
If t = s is the natural parameter then the tangent vector has unit length, so that the formula simplifies:
The unit tangent vector determines the orientation of the curve, or the forward direction, corresponding to the increasing values of the parameter. The unit tangent vector taken as a curve traces the spherical image of the original curve.
Normal or curvature vector
The normal vector, sometimes called the curvature vector, indicates the deviance of the curve from being a straight line.
It is defined as
Its normalized form, the unit normal vector, is the second Frenet vector e2(t) and defined as
The tangent and the normal vector at point t define the osculating plane at point t.
Curvature
The first generalized curvature χ1(t) is called curvature and measures the deviance of γ from being a straight line relative to the osculating plane. It is defined as
and is called the curvature of γ at point t.
The reciprocal of the curvature
is called the radius of curvature.
A circle with radius r has a constant curvature of
whereas a line has a curvature of 0.
Binormal vector
The unit binormal vector is the third Frenet vector e3(t). It is always orthogonal to the unit tangent and normal vectors at t, and is defined as
In 3-dimensional space the equation simplifies to
or to
That either sign may occur is illustrated by the examples of a right handed helix and a left handed helix.
Torsion
The second generalized curvature χ2(t) is called torsion and measures the deviance of γ from being a plane curve. Or, in other words, if the torsion is zero, the curve lies completely in the same osculating plane (there is only one osculating plane for every point t). It is defined as
and is called the torsion of γ at point t.
Main theorem of curve theory
Given n − 1 functions:
then there exists a unique (up to transformations using the Euclidean group) Cn + 1-curve γ which is regular of order n and has the following properties
where the set
is the Frenet frame for the curve.
By additionally providing a start t0 in I, a starting point p0 in Rn and an initial positive orthonormal Frenet frame {e1, …, en − 1} with
we can eliminate the Euclidean transformations and get unique curve γ.
Frenet–Serret formulas
The Frenet–Serret formulas are a set of ordinary differential equations of first order. The solution is the set of Frenet vectors describing the curve specified by the generalized curvature functions χi.