
 | ||
In concurrent computing, a deadlock is a state in which each member of a group of actions, is waiting for some other member to release a lock. Deadlock is a common problem in multiprocessing systems, parallel computing, and distributed systems, where software and hardware locks are used to handle shared resources and implement process synchronization.
Contents
- Necessary conditions
- Deadlock handling
- Ignoring deadlock
- Detection
- Prevention
- Livelock
- Distributed deadlock
- References
In an operating system, a deadlock occurs when a process or thread enters a waiting state because a requested system resource is held by another waiting process, which in turn is waiting for another resource held by another waiting process. If a process is unable to change its state indefinitely because the resources requested by it are being used by another waiting process, then the system is said to be in a deadlock.
In a communications system, deadlocks occur mainly due to lost or corrupt signals rather than resource contention.
Necessary conditions
A deadlock situation can arise if and only if all of the following conditions hold simultaneously in a system:
- Mutual exclusion: The resources involved must be unshareable; otherwise, the processes would not be prevented from using the resource when necessary. Only one process can use the resource at any given instant of time
- Hold and wait or resource holding: a process is currently holding at least one resource and requesting additional resources which are being held by other processes.
- No preemption: a resource can be released only voluntarily by the process holding it.
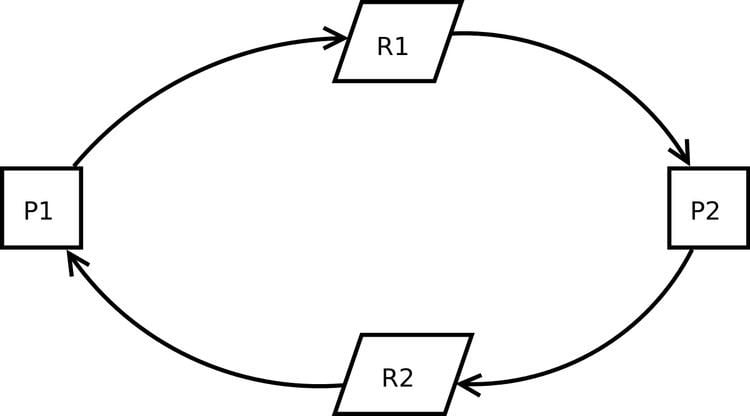
- Circular wait: a process must be waiting for a resource which is being held by another process, which in turn is waiting for the first process to release the resource. In general, there is a set of waiting processes, P = {P1, P2, …, PN}, such that P1 is waiting for a resource held by P2, P2 is waiting for a resource held by P3 and so on until PN is waiting for a resource held by P1.
These four conditions are known as the Coffman conditions from their first description in a 1971 article by Edward G. Coffman, Jr.
Deadlock handling
Most current operating systems cannot prevent deadlocks. When a deadlock occurs, different operating systems respond to them in different non-standard manners. Most approaches work by preventing one of the four Coffman conditions from occurring, especially the fourth one. Major approaches are as follows.
Ignoring deadlock
In this approach, it is assumed that a deadlock will never occur. This is also an application of the Ostrich algorithm. This approach was initially used by MINIX and UNIX. This is used when the time intervals between occurrences of deadlocks are large and the data loss incurred each time is tolerable.
Detection
Under the deadlock detection, deadlocks are allowed to occur. Then the state of the system is examined to detect that a deadlock has occurred and subsequently it is corrected. An algorithm is employed that tracks resource allocation and process states, it rolls back and restarts one or more of the processes in order to remove the detected deadlock. Detecting a deadlock that has already occurred is easily possible since the resources that each process has locked and/or currently requested are known to the resource scheduler of the operating system.
After a deadlock is detected, it can be corrected by using one of the following methods:
- Process termination: one or more processes involved in the deadlock may be aborted. One could choose to abort all competing processes involved in the deadlock. This ensures that deadlock is resolved with certainty and speed. But the expense is high as partial computations will be lost. Or, one could choose to abort one process at a time until the deadlock is resolved. This approach has high overhead because after each abort an algorithm must determine whether the system is still in deadlock. Several factors must be considered while choosing a candidate for termination, such as priority and age of the process.
- Resource preemption: resources allocated to various processes may be successively preempted and allocated to other processes until the deadlock is broken.
Prevention
Deadlock prevention works by preventing one of the four Coffman conditions from occurring.
Livelock
A livelock is similar to a deadlock, except that the states of the processes involved in the livelock constantly change with regard to one another, none progressing. This term was defined formally at some time during the 1970s—an early sighting in the published literature is in Babich's 1979 article on program correctness. Livelock is a special case of resource starvation; the general definition only states that a specific process is not progressing.
Livelock is a risk with some algorithms that detect and recover from deadlock. If more than one process takes action, the deadlock detection algorithm can be repeatedly triggered. This can be avoided by ensuring that only one process (chosen arbitrarily or by priority) takes action.
Distributed deadlock
Distributed deadlocks can occur in distributed systems when distributed transactions or concurrency control is being used. Distributed deadlocks can be detected either by constructing a global wait-for graph from local wait-for graphs at a deadlock detector or by a distributed algorithm like edge chasing.
Phantom deadlocks are deadlocks that are falsely detected in a distributed system due to system internal delays but don't actually exist. For example, if a process releases a resource R1 and issues a request for R2, and the first message is lost or delayed, a coordinator (detector of deadlocks) could falsely conclude a deadlock (if the request for R2 while having R1 would cause a deadlock).