
 | ||
A collision or crash is an event in which two or more bodies exert forces on each other for a relatively short time. Although the most common colloquial use of the word "collision" refers to incidents in which two or more objects collide, the scientific use of the word "collision" implies nothing about the magnitude of the force.
Contents
- Overview
- Types of collisions
- Allision
- Analytical vs numerical approaches towards resolving collisions
- Billiards
- Animal locomotion
- Collisions used as an experimental tool
- Space exploration
- Mathematical description of molecular collisions
- Attack by means of a deliberate collision
- References
Some examples of physical interactions that scientists would consider collisions:
Some colloquial uses of the word collision are:
Overview
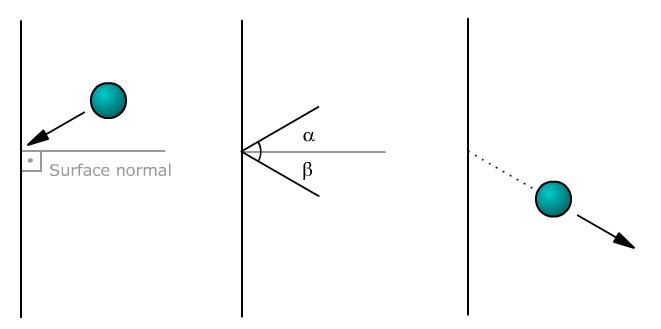
Collision is short-duration interaction between two bodies or more than two bodies simultaneously causing change in motion of bodies involved due to internal forces acted between them during this. Collisions involve forces (there is a change in velocity). The magnitude of the velocity difference just before impact is called the closing speed. All collisions conserve momentum. What distinguishes different types of collisions is whether they also conserve kinetic energy. The Line of impact is the line which is collinear to the common normal of the surfaces that are closest or in contact during impact. This is the line along which internal force of collision acts during impact, and Newton's coefficient of restitution is defined only along this line.
Specifically, collisions can either be elastic, meaning they conserve both momentum and kinetic energy, or inelastic, meaning they conserve momentum but not kinetic energy. An inelastic collision is sometimes also called a plastic collision.
A “perfectly inelastic” collision (also called a "perfectly plastic" collision) is a limiting case of inelastic collision in which the two bodies stick together after impact.
The degree to which a collision is elastic or inelastic is quantified by the coefficient of restitution, a value that generally ranges between zero and one. A perfectly elastic collision has a coefficient of restitution of one; a perfectly inelastic collision has a coefficient of restitution of zero.
Types of collisions
There are two types of collisions between two bodies - 1) Head-on collisions or one-dimensional collisions - where the velocity of each body just before impact is along the line of impact, and 2) Non-head-on collisions, oblique collisions or two-dimensional collisions - where the velocity of each body just before impact is not along the line of impact.
According to the coefficient of restitution, there are two special cases of any collision as written below:
- A perfectly elastic collision is defined as one in which there is no loss of kinetic energy in the collision. In reality, any macroscopic collision between objects will convert some kinetic energy to internal energy and other forms of energy, so no large-scale impacts are perfectly elastic. However, some problems are sufficiently close to perfectly elastic that they can be approximated as such. In this case, the coefficient of restitution equals one.
- An inelastic collision is one in which part of the kinetic energy is changed to some other form of energy in the collision. Momentum is conserved in inelastic collisions (as it is for elastic collisions), but one cannot track the kinetic energy through the collision since some of it is converted to other forms of energy. In this case, coefficient of restitution does not equal one.
In any type of collision there is a phase when for a moment colliding bodies have the same velocity along the line of impact.Then the kinetic energy of bodies reduces to its minimum during this phase and may be called a maximum deformation phase for which momentarily the coefficient of restitution becomes one.
Collisions in ideal gases approach perfectly elastic collisions, as do scattering interactions of sub-atomic particles which are deflected by the electromagnetic force. Some large-scale interactions like the slingshot type gravitational interactions between satellites and planets are perfectly elastic.
Collisions between hard spheres may be nearly elastic, so it is useful to calculate the limiting case of an elastic collision. The assumption of conservation of momentum as well as the conservation of kinetic energy makes possible the calculation of the final velocities in two-body collisions.
Allision
In maritime law, it is occasionally desirable to distinguish between the situation of a vessel striking a moving object, and that of it striking a stationary object. The word "allision" is then used to mean the striking of a stationary object, while "collision" is used to mean the striking of a moving object.
Analytical vs. numerical approaches towards resolving collisions
Relatively few problems involving collisions can be solved analytically; the remainder require numerical methods. An important problem in simulating collisions is determining whether two objects have in fact collided. This problem is called collision detection.
Billiards
Collisions play an important role in cue sports. Because the collisions between billiard balls are nearly elastic, and the balls roll on a surface that produces low rolling friction, their behavior is often used to illustrate Newton's laws of motion. After a zero-friction collision of a moving ball with a stationary one of equal mass, the angle between the directions of the two balls is 90 degrees. This is an important fact that professional billiards players take into account, although it assumes the ball is moving frictionlessly across the table rather than rolling with friction. Consider an elastic collision in 2 dimensions of any 2 masses m1 and m2, with respective initial velocities u1 and u2 where u2 = 0, and final velocities V1 and V2. Conservation of momentum gives m1u1 = m1V1+ m2V2. Conservation of energy for an elastic collision gives (1/2)m1|u1|2 = (1/2)m1|V1|2 + (1/2)m2|V2|2. Now consider the case m1 = m2: we obtain u1=V1+V2 and |u1|2 = |V1|2+|V2|2. Taking the dot product of each side of the former equation with itself, |u1|2 = u1•u1 = |V1|2+|V2|2+2V1•V2. Comparing this with the latter equation gives V1•V2 = 0, so they are perpendicular unless V1 is the zero vector (which occurs if and only if the collision is head-on).
In a perfectly inelastic collision, i.e., a zero coefficient of restitution, the colliding particles stick together. It is necessary to consider conservation of momentum:
where v is the final velocity, which is hence given by
The reduction of total kinetic energy is equal to the total kinetic energy before the collision in a center of momentum frame with respect to the system of two particles, because in such a frame the kinetic energy after the collision is zero. In this frame most of the kinetic energy before the collision is that of the particle with the smaller mass. In another frame, in addition to the reduction of kinetic energy there may be a transfer of kinetic energy from one particle to the other; the fact that this depends on the frame shows how relative this is. With time reversed we have the situation of two objects pushed away from each other, e.g. shooting a projectile, or a rocket applying thrust (compare the derivation of the Tsiolkovsky rocket equation).
Animal locomotion
Collisions of an animal's foot or paw with the underlying substrate are generally termed ground reaction forces. These collisions are inelastic, as kinetic energy is not conserved. An important research topic in prosthetics is quantifying the forces generated during the foot-ground collisions associated with both disabled and non-disabled gait. This quantification typically requires subjects to walk across a force platform (sometimes called a "force plate") as well as detailed kinematic and dynamic (sometimes termed kinetic) analysis.
Collisions used as an experimental tool
Collisions can be used as an experimental technique to study material properties of objects and other physical phenomena.
Space exploration
An object may deliberately be made to crash-land on another celestial body, to do measurements and send them to Earth before being destroyed, or to allow instruments elsewhere to observe the effect. See e.g.:
Mathematical description of molecular collisions
Let the linear, angular and internal momenta of a molecule be given by the set of r variables { pi }. The state of a molecule may then be described by the range δwi = δp1δp2δp3 ... δpr. There are many such ranges corresponding to different states; a specific state may be denoted by the index i. Two molecules undergoing a collision can thus be denoted by (i, j) (Such an ordered pair is sometimes known as a constellation.) It is convenient to suppose that two molecules exert a negligible effect on each other unless their centre of gravities approach within a critical distance b. A collision therefore begins when the respective centres of gravity arrive at this critical distance, and is completed when they again reach this critical distance on their way apart. Under this model, a collision is completely described by the matrix
Attack by means of a deliberate collision
Types of attack by means of a deliberate collision include:
An attacking collision with a distant object can be achieved by throwing or launching a projectile.