
 | ||
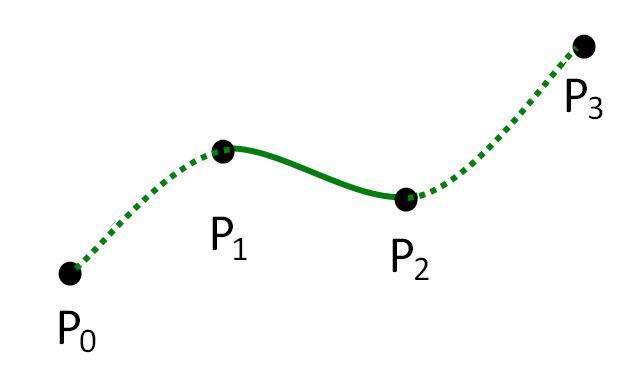
In computer graphics, centripetal Catmull–Rom spline is a variant form of Catmull-Rom spline formulated by Edwin Catmull and Raphael Rom according to the work of Barry and Goldman. It is a type of interpolating spline (a curve that goes through its control points) defined by four control points
Contents
Definition
Let
where
and
in which
Plugging
Advantages
Centripetal Catmull–Rom spline has several desirable mathematical properties compared to the original and the other types of Catmull-Rom formulation. First, it will not form loop or self-intersection within a curve segment. Second, cusp will never occur within a curve segment. Third, it follows the control points more tightly.
Other uses
In computer vision, centripetal Catmull-Rom spline has been used to formulate an active model for segmentation. The method is termed active spline model. The model is devised on the basis of active shape model, but uses centripetal Catmull-Rom spline to join two successive points (active shape model uses simple straight line), so that the total number of points necessary to depict a shape is less. The use of centripetal Catmull-Rom spline makes the training of a shape model much simpler, and it enables a better way to edit a contour after segmentation.
Code example
The following is an implementation of the Catmull–Rom spline in Python.
UNITY C# IMPLEMENTATION
Note: If you need to implement it in 3d space with Vector3 points, just extend the float a in function GetT to this : Mathf.Pow((p1.x-p0.x), 2.0f) + Mathf.Pow((p1.y-p0.y), 2.0f) + Mathf.Pow((p1.z-p0.z), 2.0f); and convert all your Vectors2 to Vectors3.