
Developer OpenSynergy GmbH Latest release 7.0 | OS family Real-time Kernel type Microkernel | |
 | ||
Marketing target Safe and secure integration of automotive systems by virtualization technology on multicore processors | ||
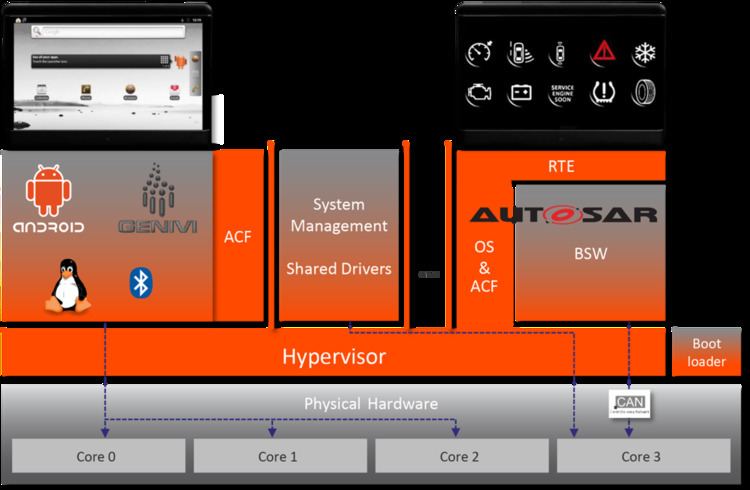
COQOS is a highly scalable software framework for in-car head units, instrument clusters, connectivity boxes, or driver assistance systems. Its hypervisor-based architecture makes it possible to run several separated software partitions on a single processor. Within such a partition, COQOS supports both AUTOSAR real time automotive functions and full operating systems like Linux and Android™.
Contents
This system virtually eliminates mutual interference, because of the independence of each partition. Modular boot and fast boot technology ensure quick availability of critical functionality. Special drivers make it even possible to share hardware resources (like audio and video) between partitions.
Another essential element of COQOS is the AUTOSAR environment. This allows the seamless integration of AUTOSAR software components and basic software modules.
Supported hardware
Supported target processor architectures
Target board support package
Features
AUTOSAR
Supports AUTOSAR Release 3.1 and AUTOSAR Release 4.x. The COQOS AUTOSAR OS has been developed from the ground up to ensure the most efficient use of the hypervisor. The AUTOSAR OS, BSW Scheduler, and RTE are closely integrated with COQOS. Standard AUTOSAR basic software from the OEM, third-party software vendors, or OpenSynergy can be easily integrated.
Guest OS (operating system)
COQOS provides support for the following guest operating systems:
Fast-boot Android
The fast-boot Android reduces boot time to 50 percent with no effect on the operating system itself. It can run in a native environment or virtualized.
Fast-booting rear-view camera
A virtualized rear-view camera function makes it possible to safely integrate an open source guest operating system and the rear-view camera function together with the AUTOSAR software on a single chip. The camera function appears 1.5 seconds after cold-booting.
Fast boot and modular boot
To satisfy the highest requirements on the fast availability of CAN communication and specific applications, COQOS includes a fast-boot loader and a modular-boot mechanism, which allows partitions to load and start sequentially.
Flexible assignment
On multicore processors COQOS makes it possible to flexibly assign partitions to processor cores. This ensures optimal utilization of processor computing power.
Shared hardware
Many important use cases require that a single hardware resource is shared among multiple partitions: OpenSynergy‘s virtualized GPU allows the sharing of a single Graphics Processing Unit (GPU) between several graphics-intensive applications, which may have different requirements in terms of safety and real-time performance. In addition several partitions can display information on a common graphics device (in window or overlays).
Automotive Communication Framework (ACF)
The ACF is a configurable communication bridge between the AUTOSAR RTE, Linux applications, and Android apps.
ECU State Manager
A configurable watchdog (contained in a separate partition) can observe the behavior of specific applications, and take action when the system does not behave correctly.
Development Environment
Development tools
All COQOS development tools are built on Eclipse and ARTOP. The development tools include AUTOSAR-compliant generators, configuration tools for the hypervisor as well as tracing and debugging tools.
Development host support
COQOS development tools are designed for use on Linux Ubuntu 12.04. Support is also available for other Linux distributions.