
 | ||
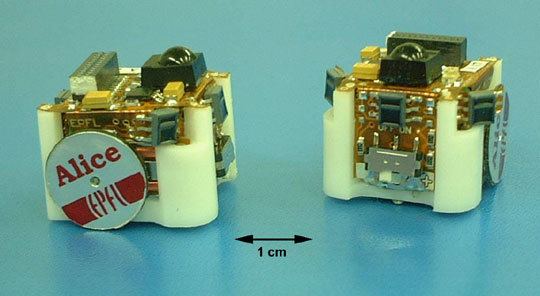
The Alice is a very small "sugarcube" mobile robot (2x2x2cm) developed at the Autonomous Systems Lab (ASL) at the EPFL in Lausanne, Switzerland between 1998 and 2004. It has been part of the Institute of Robotics and Intelligent Systems (IRIS) at ETH Zurich since 2006.
Contents
It was designed with the following goals:
Main Features
Main Robot
Extension modules
Projects and applications
References
Alice mobile robot Wikipedia(Text) CC BY-SA