
Filename extension .xodr Extended from XML | Initial release 2005 (2005) Open format? YES (see ) | |
 | ||
Latest release 1.4(4 November 2015; 16 months ago (2015-11-04)) Container for Road network logic description | ||
OpenDRIVE is an open format specification to describe a road network's logic. Its objective is to standardize the logical road description to facilitate the data exchange between different driving simulators.
Contents
- Overview
- Founders
- Core Team
- Features
- Tools
- Real Time Road Evaluation Library
- Road Designer
- Traffic and Scenario Simulation
- References
The initial release of OpenDRIVE was version 0.7 in 2005, as of November 2015 the current release is version 1.4.
Overview
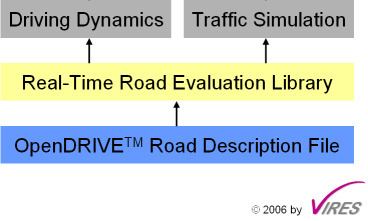
OpenDRIVE files are designed to describe entire road networks with respect to all data belonging to the road environment. They do not describe the entities acting on or interacting with the road. The OpenDRIVE data is made available to e.g. Vehicle Dynamics and Traffic Simulation via a layer of routines for the evaluation of the information contained in the OpenDRIVE file.
OpenDRIVE is managed by VIRES Simulationstechnologie GmbH and the OpenDRIVE community. The OpenDRIVE standard is reviewed and released by a core team of driving simulation experts. With the publication in 2006 members of BMW Forschung und Technik GmbH, Daimler AG, DLR e.V., Fraunhofer-Institut IVI, Krauss-Maffei Wegmann GmbH & Co. KG, Rheinmetal Defence Electronics GmbH and VIRES Simulationstechnologie GmbH joined the initiative. The associated website maintained by VIRES GmbH is intended to be the focal point for all activities involving OpenDRIVE.
Considering applications with a demand to road surface description, OpenDRIVE refers to special data structures holding these surface data. OpenCRG the microscopic brother is available taking care of the provision and evaluation of road surface descriptions. An implementation of OpenCRG into the OpenDRIVE file format specification has already been established in January 2008.
Founders
The OpenDRIVE initiative was started in 2005 by Daimler Driving Simulator, Stuttgart and VIRES Simulationstechnologie GmbH. With the publication of the initiative in 2006, other companies joined in so that OpenDRIVE is now being maintained by an international board.
Core Team
The OpenDRIVE standard is reviewed and released by a core team of driving simulation experts. The team members as of January 2010 are (alphabetical order by company):
Features
The OpenDRIVE file format provides the following features:
Tools
The evaluation of the logics data can be simplified by using a library which can be linked to various applications and serves as the standard interface between the OpenDRIVE data contained in the XML files and the evaluation of the road data within the application. Tools for OpenDRIVE which are available via the website of VIRES Simulationstechnologie GmbH or linked sites of partners include: