
 | ||
In computing, Chord is a protocol and algorithm for a peer-to-peer distributed hash table. A distributed hash table stores key-value pairs by assigning keys to different computers (known as "nodes"); a node will store the values for all the keys for which it is responsible. Chord specifies how keys are assigned to nodes, and how a node can discover the value for a given key by first locating the node responsible for that key.
Contents
- Overview
- Basic query
- Finger table
- Node join
- Stabilization
- Potential uses
- Proof sketches
- Pseudocode
- References
Chord is one of the four original distributed hash table protocols, along with CAN, Tapestry, and Pastry. It was introduced in 2001 by Ion Stoica, Robert Morris, David Karger, Frans Kaashoek, and Hari Balakrishnan, and was developed at MIT.
Overview
Nodes and keys are assigned an
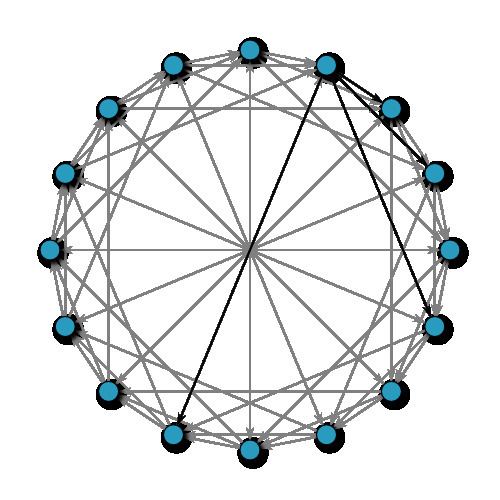
Using the Chord lookup protocol, nodes and keys are arranged in an identifier circle that has at most
Each node has a successor and a predecessor. The successor to a node is the next node in the identifier circle in a clockwise direction. The predecessor is counter-clockwise. If there is a node for each possible ID, the successor of node 0 is node 1, and the predecessor of node 0 is node
The concept of successor can be used for keys as well. The successor node of a key
Since the successor (or predecessor) of a node may disappear from the network (because of failure or departure), each node records a whole segment of the circle adjacent to it, i.e., the
Basic query
The core usage of the Chord protocol is to query a key from a client (generally a node as well), i.e. to find
Finger table
To avoid the linear search above, Chord implements a faster search method by requiring each node to keep a finger table containing up to
With such a finger table, the number of nodes that must be contacted to find a successor in an N-node network is
Node join
Whenever a new node joins, three invariants should be maintained (the first two ensure correctness and the last one keeps querying fast):
- Each node's successor points to its immediate successor correctly.
- Each key is stored in
s u c c e s s o r ( k ) . - Each node's finger table should be correct.
To satisfy these invariants, a predecessor field is maintained for each node. As the successor is the first entry of the finger table, we do not need to maintain this field separately any more. The following tasks should be done for a newly joined node
- Initialize node
n (the predecessor and the finger table). - Notify other nodes to update their predecessors and finger tables.
- The new node takes over its responsible keys from its successor.
The predecessor of
Stabilization
To ensure correct lookups, all successor pointers must be up to date. => stabilization protocol running periodically in the background. Updates finger tables and successor pointers. Stabilization protocol: Stabilize(): n asks its successor for its predecessor p and decides whether p should be n‘s successor instead (this is the case if p recently joined the system). Notify(): notifies n‘s successor of its existence, so it can change its predecessor to n Fix_fingers(): updates finger tables
Potential uses
Proof sketches
With high probability, Chord contacts
Suppose node
This process of halving the remaining distance repeats itself, so after
If Chord keeps track of
Simply, the probability that all
Pseudocode
The pseudocode to find the successor node of an id is given below:
// ask node n to find the successor of id n.find_successor(id) //Yes, that should be a closing square bracket to match the opening parenthesis. //It is a half closed interval. if (id ∈ (n, successor] ) return successor; else // forward the query around the circle n0 = closest_preceding_node(id); return n0.find_successor(id); // search the local table for the highest predecessor of id n.closest_preceding_node(id) for i = m downto 1 if (finger[i]∈(n,id)) return finger[i]; return n;The pseudocode to stabilize the chord ring/circle after node joins and departures is as follows:
// create a new Chord ring. n.create() predecessor = nil; successor = n; // join a Chord ring containing node n'. n.join(n') predecessor = nil; successor = n'.find_successor(n); // called periodically. n asks the successor // about its predecessor, verifies if n's immediate // successor is consistent, and tells the successor about n n.stabilize() x = successor.predecessor; if (x∈(n, successor)) successor = x; successor.notify(n); // n' thinks it might be our predecessor. n.notify(n') if (predecessor is nil or n'∈(predecessor, n)) predecessor = n'; // called periodically. refreshes finger table entries. // next stores the index of the finger to fix n.fix_fingers() next = next + 1; if (next > m) next = 1; finger[next] = find_successor(n+